
He learned to walk the robot dog Morti in an hour, beating the time normally taken by a foal, which can stand and run in about a couple of hours.
All thanks to his virtual spinal cord, a program in a computer, built on the model of that of animals and which receives no initial education.
That is to say, he does not know the anatomy of the robot in advance and learns along the way, just like a puppy.
The result, published in the journal Nature Machine Intelligence, was obtained by the group of Felix Ruppert, of the German institute Max Planck, and also sheds new light on the biology of animals.
Animals are born with muscle coordination networks located in the spinal cord.
However, learning to precisely coordinate muscles and tendons takes time: puppies initially rely heavily on more basic reflexes, which help the animal during the first attempts at movement, while later more advanced muscle control takes some time. of refinement.
Now, two researchers led by Felix Ruppert have built a four-legged robot that learns to walk in the same way.
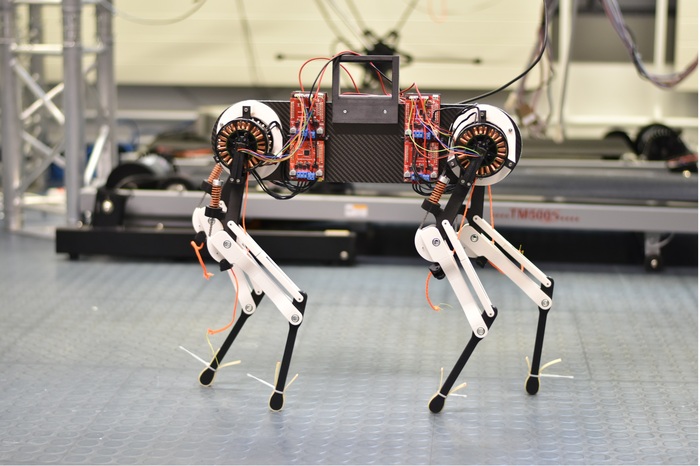
The virtual spinal cord of the Dead robot is simulated by a program, at work in a computer located on what would be the dog's back.
The data collected by the sensors located in the feet and legs are continuously compared with those provided by the program, which does not know how the device is made: if the robot trips, the algorithm adapts and modifies the movements, until the walk becomes fluid and stable.
Morti also consumes only 5 watts of power to walk, unlike other quadrupedal robots that need tens or even hundreds of watts, due to the energy consumed by more complex control systems, which know exactly the geometry of the body of the robot and the way it works.







